
哈佛大学旋转多材料3D打印最新突破,或能直接制造机器人灵巧手
3D打印技术参考注意到,哈佛大学近日在软体机器人3D打印开发方面取得最新进展,这不禁让笔者想起小鹏发布的IRON人形机器人,后者使用了3D打印的高性能聚合物晶格结构作为仿生肌肉。
此次的突破在于,哈佛通过旋转多材料3D打印方法,可直接制造出能够编程运动轨迹的软机器人,其驱动逻辑、形变能力和执行功能,在打印完成时已经直接内置于材料结构中,无需后续组装或集成传动,实现了“设计即功能”的目标。
旋转多材料3D打印两次登顶Nature正刊
哈佛所开发的旋转多材料3D打印技术曾经分别于2019年和2023年两次登顶Nature正刊,可见该技术的创新性不仅得到了学术界的广泛认可,而且在不断发展。
旋转多材料3D打印平台的打印头配备四个墨盒,每个墨盒可以包含不同材料。然后将油墨送入一个复杂喷嘴,该喷嘴允许同时打印多种材料。当喷嘴旋转和平移时,油墨以螺旋细丝的形式挤出,为后续复杂功能结构的打印奠定了基础。
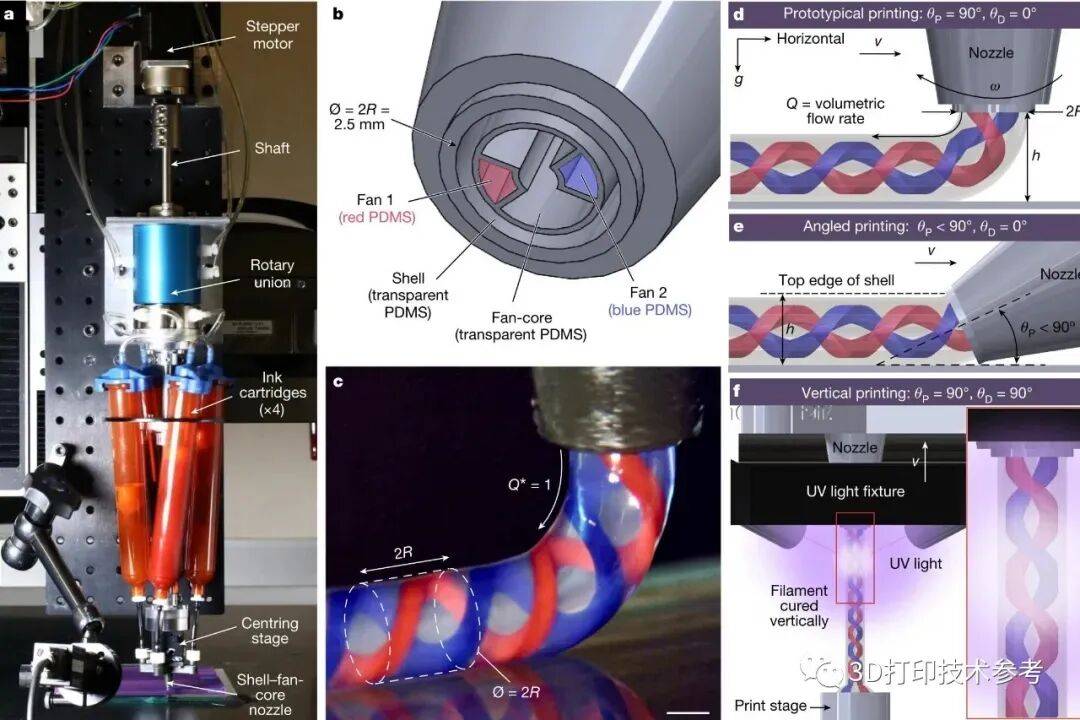
RM-3DP技术的多种墨水可以不同旋转速率同时挤出复杂喷嘴,可以打印出具有空间性质和亚体素层面的软材料。目前,RM-3DP已被用于制造螺旋介电弹性体执行器和具有局部可调力学性能的结构复合材料。类似方法结合多材料喷嘴旋转与流速调整,生成具有可调节膨胀行为的水凝胶复合材料。
最新研究:材料融合与结构形成
最新研究使用了两种材料——可光聚聚氨酯丙烯酸酯树脂和温敏水凝胶,它可以在同一时间、单一喷嘴中的挤出的单一形状中融合两种材料组成的两种结构,这读起来非常拗口。
单一性状包含两种结构,是因为其中一种材料为牺牲材料,可通过温度控制发生溶解流出,从而在结构内部形成气动空腔。
具体地说,外层的聚氨酯在紫外光下迅速固化后形成坚固柔性外壳,构成机器人的主题;而聚合物凝胶则填充了充当内部通道的空间,打印完成后经冲洗即可出现空腔。相当于在打印过程中同时完成了结构构型和内置管道雕刻两个步骤。
功能实现:气动驱动与可编程形变
内部空腔的形成将被动结构转化为主动执行器,其工作原理与人体肌肉类似:气压或流体压力会使结构按预定方式变形。
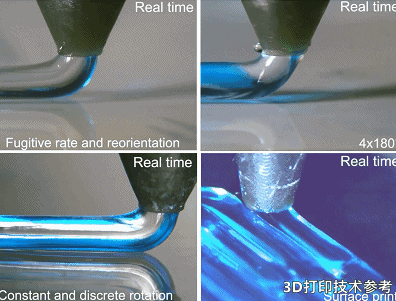
通过控制打印参数,包括喷嘴的旋转和物料流速,可精确控制内部通道的位置、大小和几何形状,由于空腔被设计为非对称分布,因此在充气时并不会呈现均匀形变,从而驱动结构向预定方向弯曲和扭转。
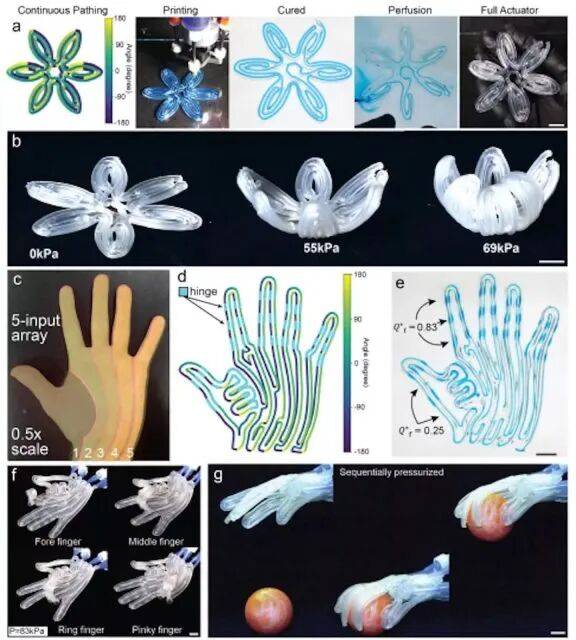
研究人员展示了通过RM-3DP快速设计和制造带有非对称气动系统的软机器人。他们首先生成了一维软机器人丝,并通过力和曲率测量表征其力学,验证计算建模。接着展示了可以制造出1D、2D和2.5D软机器人,这些机器人经过形状变迁到三维图案。作为最后的演示,利用了一种连续的丝状打印路径算法,将结构分割成子域,利用连接的费马螺旋生成直接编码扩张应变方向的图像中的打印路径。

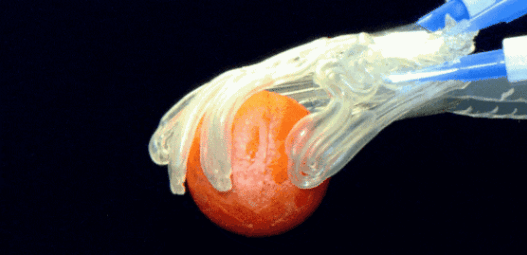
作为研究的一部分,该团队打印了两个演示部件:一个是充气后会展开的螺旋形花朵状致动器,另一个是可包裹物体的五指形手形抓取器。这两个部件均采用连续3D打印工艺一次性完成,无需额外组装,这正是RM-3D打印技术的特点。
对机器人制造的重新定义
对比小鹏的IRON的晶格肌肉,这种3D打印的晶格是一种结构仿生,它优化了力的传递效率,减少机械感,让机器人的动作自然流畅,但其依然依赖外部电机和刚性连杆。而哈佛最新演示的技术则是“结构-驱动一体仿生”,材料自身就是驱动器,更接近生物肌肉收缩即运动的原理。
这项技术该如何应用于当前的机器人技术?它或许能够为人形机器人灵巧手、自适应蒙皮和柔性关节制造提供新的解决方案。使机器人能够更接近生物的柔顺性、安全性和环境适应性。
软机器人的快速设计和制造在形状变形、驱动和可穿戴设备方面日益受到关注。总的来说,这项研究介绍了一种简便的制造方法,可以制造出具有可预测、可编程运动的软体机器人,并将编码运动直接写入材料中。主要作者威尔特说道,“我们的目标是为各种应用创造柔软的仿生机器人。”
推荐阅读:Rotational Multimaterial 3D Printing of Soft Robotic Matter With Embedded Asymmetrical Pneumatics
注:本文由3D打印技术参考创作,未经联系授权,谢绝转载。#增材制造 #3D打印





