中国学者3D打印晶格结构肌肉骨骼机器人,登上Sci Adv封面,晶格结构生成方法具有开创意义
3D打印技术参考注意到,来自瑞士洛桑联邦理工学院机械工程学院的中国学者管清华等人,近日在Science Advances上以封面文章发表了“”的研究。

该团队制造了一头受肌肉骨骼启发的肌腱驱动机器人大象,其关节与可编程弯曲轮廓相结合,象鼻结构柔软连续。需要指出的是,他们没有使用不同材料来制造软、硬部件,而是开发出了一种晶格结构生成技术,其支持超过一百万种离散配置和无限几何变化,仅使用单一材料制造的不同晶格分布,即可使材料在不同的区域呈现柔软、坚硬的不同状态。3D打印技术参考注意到,该方案为设计轻量级、适应性强的机器人提供了可扩展的解决方案。

真实骨骼肌肉结构为人形机器人开发提供思路
软组织与刚性结构(一些是被动的,另一些是功能性的)的整合在能量、精度和运动范围方面提供了优势,从而可以实现各种复杂的行为。例如,猎豹有弹性的肌腱,可以与坚硬的骨骼一起储存和释放能量,实现爆发性的加速。人手中肌肉、肌腱和韧带的排列和相互作用使精细运动技能成为可能,而蛇的灵活脊柱则使运动更加灵活。这些对于机器人来说是令人羡慕的特性,并启发了机器人肌肉骨骼下肢、上半身甚至人形机器人的发展。

宇树科技机器人
多材料3D打印在机器人结构开发方面的限制
3D打印已成为制造软刚肌肉骨骼机器人的关键制造技术。这种多材料增材制造技术可以形成具有空间变化材料特性的复杂三维形状,并在驱动下表现出多模态变形。然而,动物肌肉骨骼结构的复杂性和多样性是显而易见的,存在许多不同的关节排列,甚至完全肌肉化的器官(如象鼻)。因此,我们需要能够模仿这种广泛的潜在生理结构的设计方法和3D打印技术。

多材料3D打印是实现肌肉骨骼软刚系统结构单阶段制造的关键技术。例如,通过硬骨和软韧带两种材料可以制造骨架手、视觉控制打印和多材料多喷嘴3D打印。

虽然多材料3D打印本质上可以实现材料或不同特性的组合,但这种方法在可实现的肌肉骨骼结构的复杂性和多样性方面也受到一定限制。首先,它将结构不同部件的刚度范围限制在一个离散的或通常很小的范围内,限制了复制自然界中连续变化的广泛刚度的能力。其次,材料的各向异性很大程度上是由其成分或3D打印技术决定的,这使得模拟肌肉骨骼系统中看到的底层各向异性和方向性变得具有挑战性。
可编程晶格超材料的挑战
具有可编程体积行为的晶格超材料的开发使得能够从单一基础材料中获得更连续和更广泛的机械性能。晶格结构通常使用重复的晶胞形成,例如体心立方、开尔文或八面体。虽然这些结构提供了增强的机械性能,但它们对重复几何形状的依赖限制了可实现的刚度和各向异性的范围。
最近的努力引入了更复杂的几何形状,例如拓扑调节或厚度调制,以产生梯度特性 。然而,这些方法主要关注各向同性、厚度变化或有限范围的结构变体,限制了它们在设计高度可调的机械行为中的适用性。此外,由软材料开发的晶格结构在大变形过程中表现出复杂的力学行为,这是由于材料在大变形过程中的非线性(例如,超弹性和梁屈曲)使得这些结构的设计和优化具有挑战性。
越传统晶格结构的设计方法,刚度和各向异性范围显著扩大
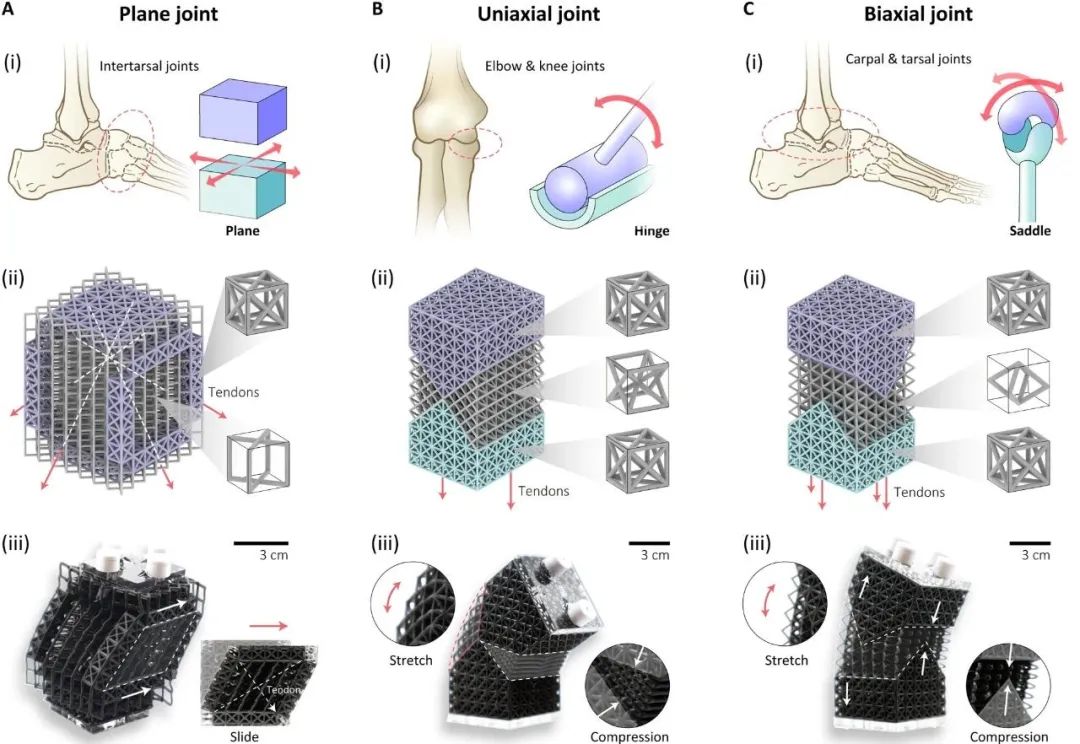
这项工作展示了改变晶格结构的几何形状以实现一系列结构特性的潜力,例如可编程变形、刚度、泊松比和各向同性,刚度范围和编程其各向异性的能力目前受到可创建的不同几何形状范围的限制。
研究人员提出了一种使用单一材料设计和制造可编程软硬晶格结构的方法。该方法的核心是拓扑调控 (TR),它通过引入广义晶格混合方法扩展了晶格单元的设计空间。这使得能够创建无限多种新的晶格几何形状,其刚度和各向异性属性的范围显著扩大,超越了传统晶格设计的约束。

利用拓扑调控,研究人员可以创建具有更多样化力学行为的晶格结构,从高度柔性到刚性,从而能够更精细地控制材料属性。在此基础上,将叠加编程 (SP) 与拓扑调控相结合,从而能够在毫米级上连续或离散地改变晶格刚度、各向异性和连通性的空间。拓扑混合和叠加分布控制着晶格的空间属性,并允许结构在不同力学状态之间进行渐进或突然的转变。这使得不同的机械状态能够融合,从而创建柔软的连续身体结构和机械特性之间的离散过渡,可用于设计更刚性的关节结构。

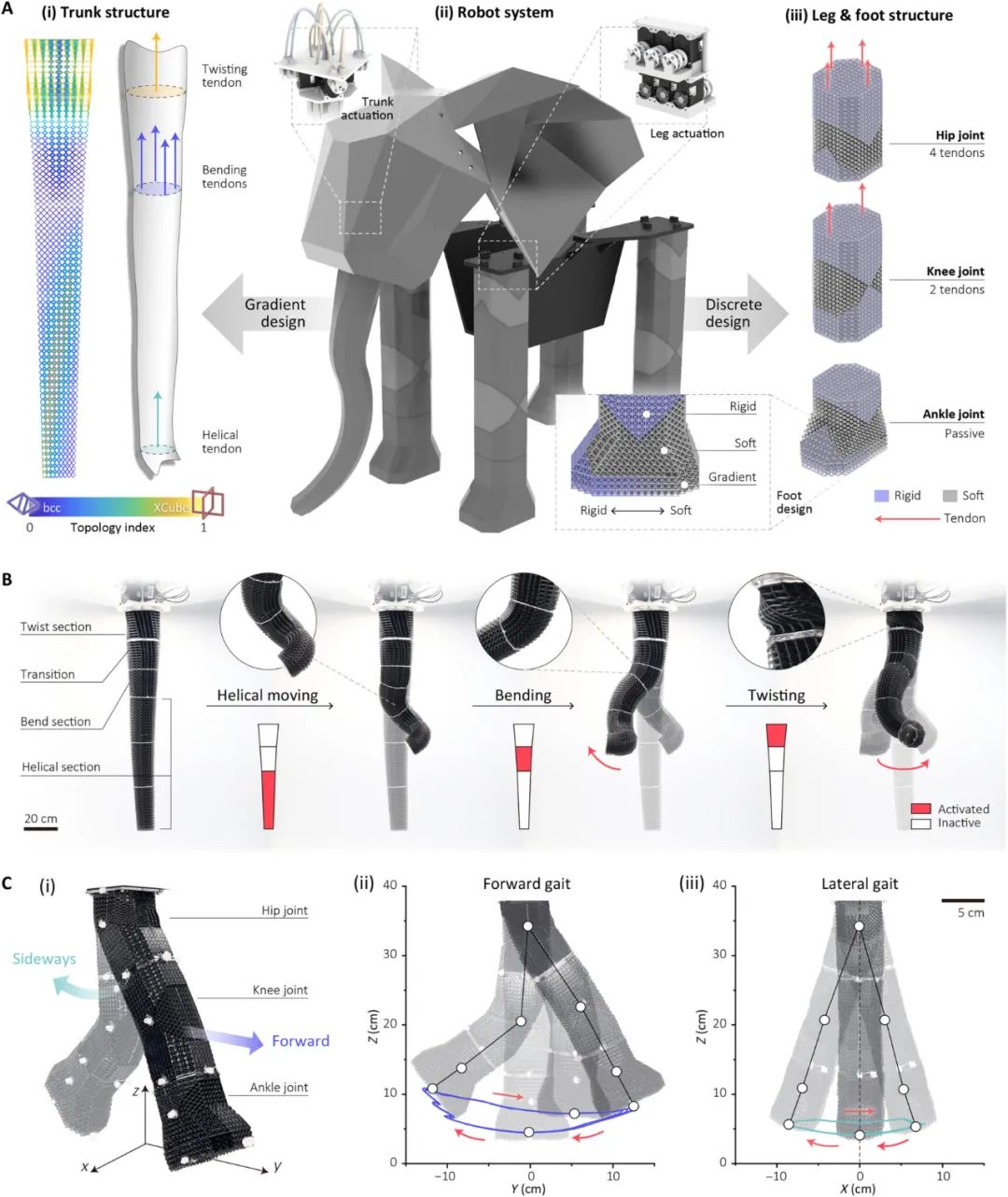
为了利用这些新的晶格结构和融合方法,研究人员引入了一个运动行为编程的计算框架,可用于晶格结构的连续调节和离散分布。通过优化拓扑索引场和晶格单元叠加,可以将运动行为直接编码到结构设计中。该框架允许对变形轮廓、承重能力和关节行为进行结构编程,从而利用结构实现智能行为。
为了展示这种方法,研究人员制造了一个受肌肉骨骼启发的大象机器人,它集成了用单一材料打印的软硬部件。软硬结构组成肌肉骨骼机器人系统,其中刚性结构充当承重骨架,而软结构和肌腱用作肌肉来驱动各种运动。柔软而肌肉发达的躯干表现出扭转、弯曲和螺旋运动,而刚性的骨骼关节则复制了大象臀部、膝盖和足部关节的刚度和承重特性。这些结果凸显了所开发的结构编程框架如何能够综合复杂的肌肉骨骼特性和行为,并在统一的材料系统中连接软性和刚性力学。
END
总的来说,这项研究开发出了能够优化晶格结构来实现所需运动行为的工具。基于体心立方和XCube单元就生成了100多万种立方体,可以引入更多类型的晶格结构来获得更有利的特性。与蜂窝和其他晶格结构类似,强度重量比可以非常高,从而可以实现轻型、高效和低惯性的机器人开发。开放式晶格结构也非常适合在流体中使用,因为它在提供较低阻力的同时对流体呈惰性。最后,使用开放式晶格可以将其他材料、传感器和肌腱纳入结构中,从而实现进一步的智能应用。
注:本文由3D打印技术参考创作,未经联系授权,谢绝转载。